



















GPS-Denied Navigation
GPS-Denied Navigation
Global Navigation Satellite Systems (GNSS) such as the US Global Positioning System (GPS) are increasingly vulnerable to jamming and spoofing. Affordable, and practical technology is needed to enable systems that require positional knowledge to operate safely and reliably when GNSS is no longer available.
The GNSS dependency challenge
Since the advent of GNSS, global navigation across air, land, and sea has undergone a revolution. From commercial aircraft and maritime vessels to smartphones and autonomous vehicles, modern systems have become almost entirely dependent on GNSS for real-time, high-accuracy positional information. Its widespread adoption has been driven by the low size, weight, power, and cost (SWaP-C) of GNSS receivers combined with their unparalleled accuracy.
However, GNSS has also become a victim of its own success as many systems have become over-reliant upon it – and therefore vulnerable. GNSS signals are inherently weak and highly susceptible to jamming, spoofing, and environmental interference. In critical scenarios – such as contested military environments, urban canyons, subterranean spaces, or indoors – GNSS may be unreliable or unavailable altogether. The result is a growing need for resilient, autonomous navigation systems that can operate independently of GNSS.
The solutions
Plextek has developed a suite of alternative navigation (Alt-Nav) technologies that provide reliable navigation solutions when GNSS is degraded or denied, including:
Boot-mounted Inertial Navigation (PLX-DPNS) – using high-precision Inertial Measurement Units (IMUs)
- Visual Scene Matching
– using onboard cameras to compare live imagery to known maps
- Terrain Referenced Navigation (TRN)
– altitude-based geolocation using terrain profiles
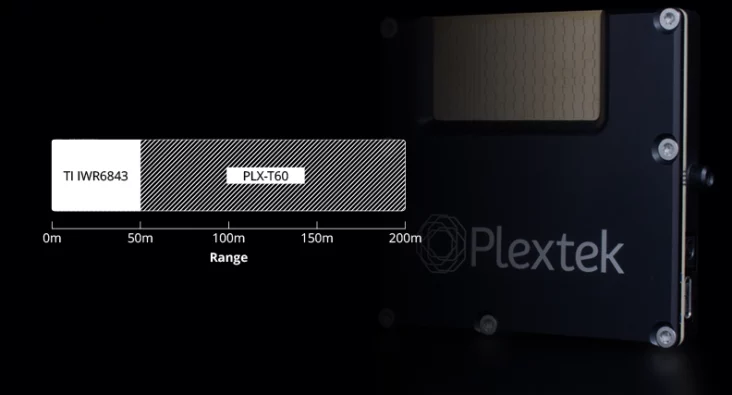
- Radio Frequency Positioning
– leveraging known RF beacons or static references
- Boot-mounted Inertial Navigation (PLX-DPNS)
– using high-precision Inertial Measurement Units (IMUs)
Every approach to Alt-Nav has its own advantages and disadvantages.
Our design approach carefully considers mission-specific factors such as power consumption, size, weight, and the target operational environment, to deliver the best solution.
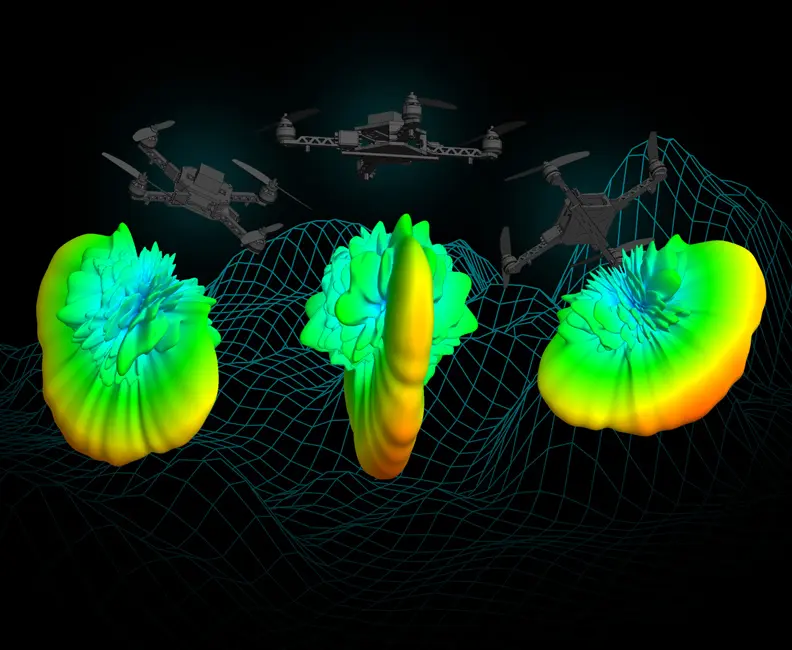
In the field of Alternate Navigation, no single sensor can guarantee reliable navigation under all conditions. Inertial Measurement Units (IMUs) excel at tracking short-term motion without relying on external signals but accumulate drift over time. Magnetic compasses provide heading information yet are susceptible to system biases or local magnetic interference. Radar can deliver precise range and bearing to nearby objects, though performance degrades in cluttered environments or rough weather. And while GNSS offers high accuracy in open conditions, it is increasingly vulnerable to jamming, spoofing, and signal degradation in contested or denied areas.
To maximize the effectiveness of these individual technologies, integration is key. At the heart of our approach is our advanced data fusion capability. Our proprietary Particle Filter algorithm is specifically engineered to handle non-linear sensor data, making it exceptionally well suited to fusing disparate sources such as visual scene matching, terrain profiling, and inertial data. Fusing multiple sensor sources together enables us to deliver navigation solutions with high reliability and adaptability in uncertain conditions.
In addition to developing the core navigation technologies and fusion algorithms, Plextek has created a powerful Data Merging Framework. This in-house simulation environment allows us to: model and simulate how a platform with a given set of sensors for PNT is likely to perform under different conditions. By rapidly understanding how a system is likely to perform with a given set of sensors, we can make informed decisions about what sensors are required to achieve a desired performance level for PNT.
Accurate modelling significantly reduces development time and cost, while also enabling high-confidence predictions of real-world systems.
How we deliver

- Reduce system risk through multi-sensor integration
We work rapidly and effectively with a wide range of sensing technologies—including optical, radar, inertial, and radio frequency-based systems. This allows us to select and integrate the optimal mix of sensors to deliver robust navigation performance within specific operational and environmental constraints.
- Higher accuracy in contested environments via data fusion
We specialise in intelligently combining data from multiple, diverse sources to improve the accuracy, reliability, and resilience of navigation solutions, even in contested or degraded environments.
- Faster, lower-cost development through modelling & simulation
Our expertise in modelling and simulation enables us to accurately predict navigation system performance as a function of platform dynamics, sensor selection, and mission context. This allows for informed design decisions early in the development cycle.
- Future-proof navigation solutions
We possess a deep technical understanding of how Global Navigation Satellite Systems (GNSS) function, including their vulnerabilities, signal structures, error sources, and augmentation techniques. This insight is critical in designing resilient alternatives and complementary navigation solutions.
- Seamless platform integration
We are familiar with key navigation standards for position and navigation, such as NMEA, IEC 61174:2015, and compliance across land, air, and maritime domains. This ensures our systems are compliant with industry and defence requirements, facilitating integration and certification within existing platforms.
Why choose Plextek?
Delivering advanced solutions from research through to deployable systems
“Plextek understands the unique challenges of maintaining accurate navigation when GNSS signals are degraded or denied. With deep expertise across a broad range of sensing technologies and platforms, we are well equipped to integrate the optimal combination of sensors to meet your navigation requirements – within your operational and environmental constraints.
Our strength lies in the ability to model and simulate complex scenarios, enabling us to rapidly and cost-effectively predict the right sensor mix to achieve the desired level of performance. This reduces risk and accelerates decision-making during system design.
We also excel in rapid prototyping, leveraging cross-disciplinary expertise to develop and test solutions quickly and iteratively. This allows us to validate performance in real-world conditions early in the development process.
Finally, with proven in-house design and manufacturing capabilities, we deliver fully engineered, qualified navigation systems that meet the most demanding standards for performance, reliability, and integration.”
Professor Aled Catherall, CTO

Collision Avoidance
With over 35 years of radar design experience, we deliver cutting-edge radar systems across automotive, aerospace, and industrial applications.
Our custom Multiple-Input Multiple-Output radar solutions provide the precise range, velocity, and angular measurements needed for reliable real-time collision detection in the most demanding environments.
Crewless Flight Radar
Radar sensing to enable safe flight of crewless aircraft, and autonomous uncrewed aerial vehicles.
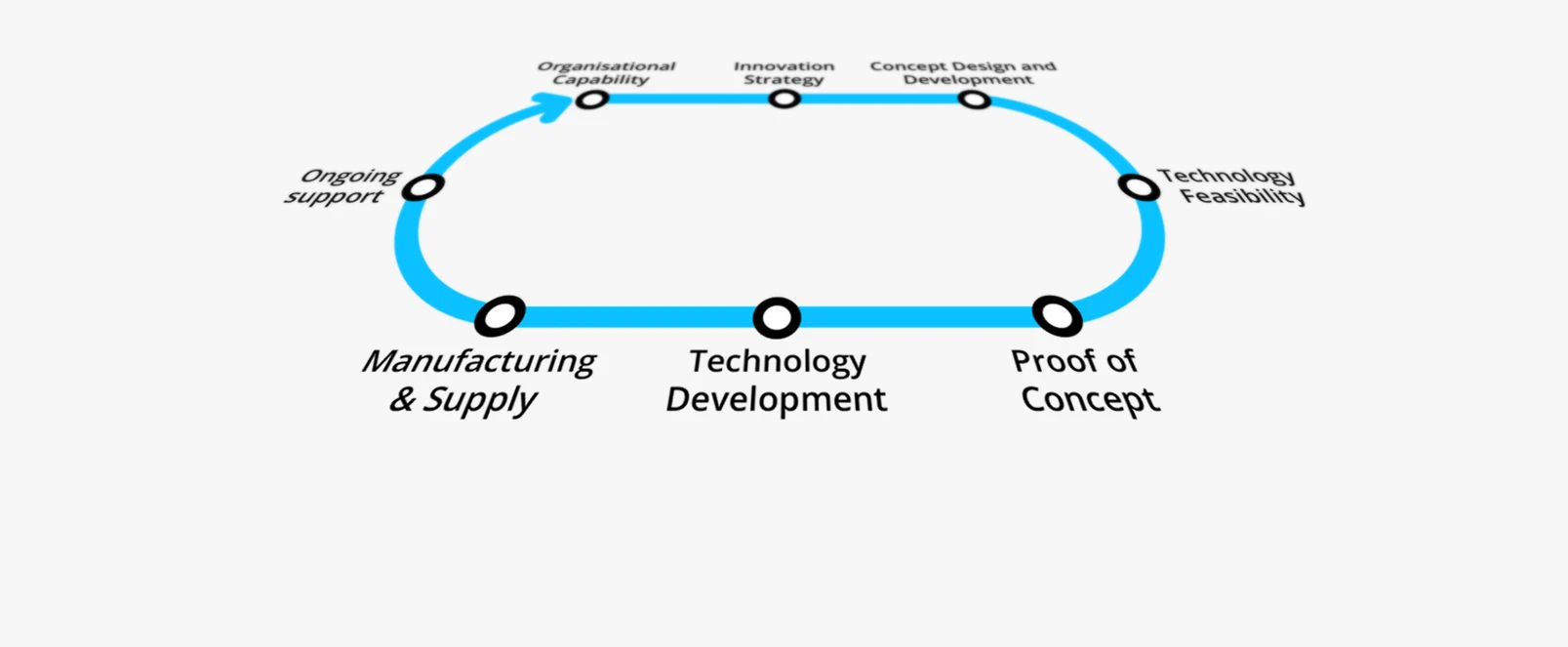
Crewless flight requires more than radar. As your development partner, Plextek provides end-to-end support from initial concept through to qualified systems, helping you navigate the technical complexities of sensor integration for autonomous platforms.

Plextek Wins Place on MOD’s DDAD Framework
Plextek Selected for £180M DDAD Framework Supporting British Army's ASGARD AI Decision-Making Programme
Field Oriented Control: Precision in Modern Motor Systems
Delivering expertise in field-oriented control for demanding motor control solutions

Radar in Modern Sensing: The Power of Sensor Fusion
Radar Sensor Fusion with Cameras and Lidar: Enhanced Sensing Technology for Autonomous Systems

mmWave radar: balancing resolution and practicality in space
mmWave radar offers the ideal balance for space applications, detecting small debris and spacecraft features with minimal power and no moving parts.

How radar works
How Does Radar Work? Understanding Radar Technology and Applications with Richard Jacklin

Why radar should be on your radar
Space missions demand sensors that work in brutal conditions - and radar works when everything else fails.

Accelerating the Next Generation of Electromagnetic Warfare
UK's £1 billion electromagnetic warfare investment risks failure without urgent procurement reform to match the pace of modern battlefield innovation.

Addressing the Escalation in GNSS Spoofing with Data Fusion
Plextek's data fusion technology helps maritime vessels maintain navigation accuracy during increasing GNSS spoofing attacks.

Driving Radar Innovation for Space in the CLEAR Mission
Plextek Supports ClearSpace in Completing Phase 2 of Mission CLEAR, Strengthening UK’s Leadership In Orbit Services.

Measuring Micro-Debris in LEO with Next-Gen Space Radar
Detecting micro-debris in real-time is key to safer space operations. Next-gen mmWave radar technology enables high-resolution tracking of even the smallest fragments in LEO, reducing collision risks and enhancing space situational awareness. Discover how this innovation supports a more sustainable orbital future.
Optimizing mmWave radar capabilities with Texas Instruments
Plextek and Texas Instruments: Optimizing mmWave radar capabilities to solve key design challenges

Augmenting UAV Safety with Ubiquitous Radar Technology
Enhancing UAV safety with ubiquitous radar tech for detect and avoid capabilities in shared airspace.
Custom Motor Control Solution for Connected Fitness Equipment
Plextek developed a bespoke BLDC motor control solution for connected fitness equipment, delivering exceptionally low torque ripple and seamless system integration.
Read More

Overcoming Training Data Bottlenecks in Thermal Imaging with Transfer Learning
Plextek's automated transfer learning approach generates labelled thermal datasets using colour camera AI models, eliminating costly manual annotation.
Read More
Using AI to Detect and Classify RF Signals in a Congested Environment
Developing AI-based RF signal classification systems, from algorithm development through to embedded real-time processing solutions
Read More

Concealed object detection for real-time parcel security screening
Concealed object detection for real-time parcel security screening with mmWave sensor design and manufacture, and real-time AI processing
Read More

Enhancing network efficiency with ML & RL
Enhancing Mobile Ad-Hoc Network Routing with GNN-Driven DRL Agent: Improving Packet Delivery and Adaptability in Dynamic Environments
Read More

Optimising Radar Training with Machine-Assisted Machine Learning
See how Plextek is optimising radar training using automating data labelling & machine-assisted machine learning
Read More

Semantic Segmentation in Visual Scene Matching
Learn how we boost accuracy in Visual Scene Matching with Semantic Segmentation, aiding navigation and tracking in dynamic environments.
Read More

Machine Learning for Rapid Propagation Assessment
Developing a groundbreaking ML model for swift and efficient coverage prediction in complex urban environments, enabling rapid optimisation of transmitter locations on standard computing hardware.
Read More

Cost-Effective Improvement in mmWave Intensity
Enhancing the mmWave antenna design for Remedee Labs, significantly boosting RF radiation efficiency and cost-effectiveness in non-pharmaceutical chronic pain treatment.
Read More

Game-Changing Radar for the CLEAR Mission
Developing vital radar technology for the CLEAR mission, advancing space debris removal techniques to safeguard operational satellites and spacecraft.
Read More

Future Sensing: Improving Mobile Ad-hoc Networks
Leading a transformative four-year research initiative to improve mobile ad-hoc networks through advanced directional antenna systems and cross-layer processing, significantly enhancing military communication capabilities.
Read More
Millimetre-Wave Radar System
Expertly engineering a compact, high-performance 60 GHz millimetre-wave radar system using innovative Substrate Integrated Waveguide technology, achieving significant advancements in target detection up to 100 metres.
Read More

